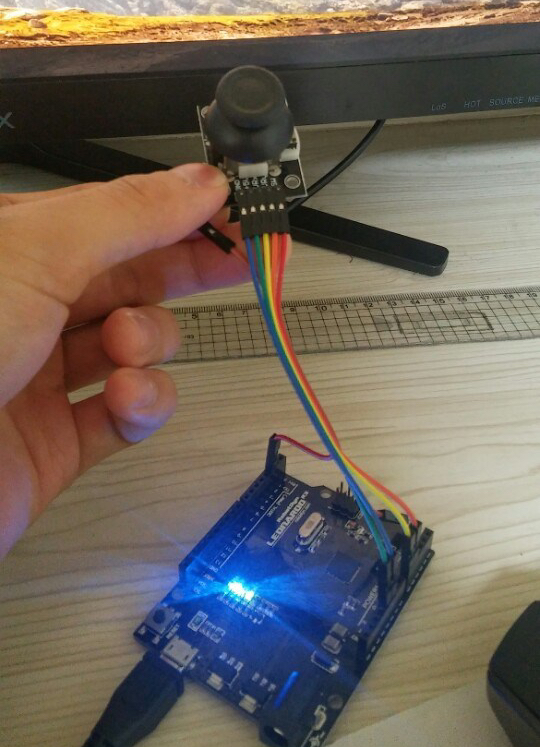
아두이노 레오나르도로 마우스 시뮬레이션하기
아두이노 레오나르도로 마우스 시뮬레이션하기
여기를 참고 했다.
// Define Pins
#include <Mouse.h>
const int mouseLeftButton = 2; // input pin for the mouse left Button
const int joystickX = A1; // joystick X axis
const int joystickY = A0; // joystick Y axis
// parameters for reading the joystick:
int cursorSpeed = 10; // output speed of X or Y movement
int responseDelay = 5; // response delay of the mouse, in ms
int threshold = cursorSpeed/4; // resting threshold
int center = cursorSpeed/2; // resting position value
boolean mouseIsActive = true; // whether or not to control the mouse
int lastSwitchState = HIGH; // previous switch state
void setup() {
pinMode(mouseLeftButton, INPUT_PULLUP); // the left mouse button pin
Mouse.begin(); // take control of the mouse
}
void loop() {
// read the switch:
int switchState = 1;
// if it’s changed and it’s high, toggle the mouse state:
if (switchState != lastSwitchState) {
if (switchState == LOW) {
mouseIsActive = !mouseIsActive;
}
}
// save switch state for next loop:
lastSwitchState = switchState;
// read and scale the two axes:
int xReading = readAxis(A1);
int yReading = readAxis(A0);
// if the mouse control state is active, move the mouse:
if (mouseIsActive) {
Mouse.move(xReading, -yReading, 0); // (x, y, scroll mouse wheel)
}
// read the mouse button and click or not click:
// if the mouse button is pressed:
if (digitalRead(mouseLeftButton) != HIGH) {
// if the mouse is not pressed, press it:
if (!Mouse.isPressed(MOUSE_LEFT)) {
Mouse.press(MOUSE_LEFT);
delay(100); // delay to enable single and double-click
}
}
// else the mouse button is not pressed:
else {
// if the mouse is pressed, release it:
if (Mouse.isPressed(MOUSE_LEFT)) {
Mouse.release(MOUSE_LEFT);
}
}
delay(responseDelay);
}
/*
reads an axis (0 or 1 for x or y) and scales the
analog input range to a range from 0 to
*/
int readAxis(int thisAxis) {
// read the analog input:
int reading = analogRead(thisAxis);
// map the reading from the analog input range to the output range:
reading = map(reading, 0, 1023, 0, cursorSpeed);
// if the output reading is outside from the
// rest position threshold, use it:
int distance = reading – center;
if (abs(distance) < threshold) {
distance = 0;
}
// return the distance for this axis:
return distance;
}